1対1通信 ドローン、コントローラ(端末)間
以前の記事で室内でドローンを飛ばす時の通信手段として、室内に設置されたAP(アクセスポイント)を介したWi-Fi通信を紹介しましたが。出先等でドローンを飛ばすには1対1の通信で行った方がスマートに運用出来る事があります。 […]
PX4 SBUSコメント
PX4-Autopilot-main\PX4-Autopilot-main\src\lib\rc\sbus.cpp sbus_input関数のコメントは以下の様になっている(一部抜粋)「フレーム間の時間でフレームの境界を […]
ラズベリー・パイModel3 B+ でOpenCVを動かす(2024年版)
放熱、消費電力の問題で古いモデルModel3 B+ でOpenCVを動かすことになったので実際に動作した、各プログラムモジュールのバージョン情報を記録しておきます。 【ハードウェア】cat /proc/cpuinfo | […]
無線モジュール(ESP32-C3)ファームウェアの書き替え
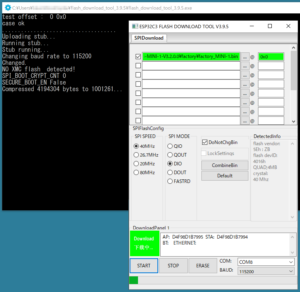
無線モジュールのファームウェア書き替えをUART通信を使用して行うやり方を記します。(納入時の基板に実装されたESP32-C3には既にAT-Command用ファームウェアが書き込んであります。) JP1をショート状態にし […]

IoTセンサーとして使用する
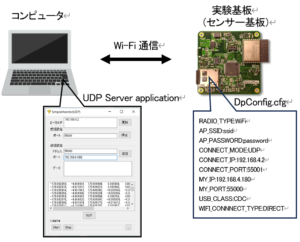
Wi-Fi環境にある実験基板のセンサー情報をコンピュータに送ります。コンピュータ上でTCPサーバーアプリケーションを実行します。基板上のmicroSDにTCPサーバー、Wi-Fiアクセスポイントの接続情報をDpConfi […]
巡回冗長検査 CRC(Cyclic Redundancy Check)
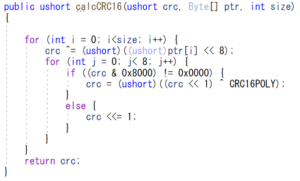
データの受け渡し時、データが正しく届いたか確認するために送出データの最後にCRCで計算したデータを追加して送出します。受取側で受け取ったデータもCRC計算し、送られてきたCRCと比較して等しかったら正しくデータを受け取れ […]

基板動作確認用バイナリーファイル
ダウンロードに基板動作確認用ファームウェア(バイナリーファイル)をアップロードしました。コンピュータと基板をUSBケーブルで接続、ハイパーターミナル等の通信ソフトを使ってシリアルポートを選択してモニタします。