【概要】
4個のDCモーターをPWMで制御できますので、クアッドコプタ又は無尾翼機を飛ばすことが出来ます。
ジャイロセンサを基板中央に配置して姿勢推定計算時、実装位置によるオフセット補正が必要ないようにしています。
自律制御等で多くの内部変数確認するための記録(ログ)が取れるようmicroSDを実装しています。
ドローンとして飛ばす前段階ではUSB接続による電源供給で開発できます。
STMicroelectronics社製 STM32CubeMX-STM32Cube初期化コード生成ツールを使用してソースコードのひな形を作成できます。
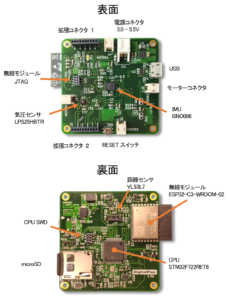
【特徴】
CPU STM32F722RET6
IMU BNO086
気圧センサ LPS25HBTR
距離センサ VL53L7CX0GC/1
無線通信 ESP32-C3-WROOM-02-N4
モーター制御 CPU timerによるPWM制御
バッテリー電圧監視 CPU A/Dによる監視
microSD
USB microBメス
拡張ポート I2C1
I2C2(距離センサと兼用)
USART2
GPIO 4本(GPIO3はバッテリーチェックと兼用)
50 x 50 x 12mm 15g(バッテリー除く)
1.6mm厚 4層基板